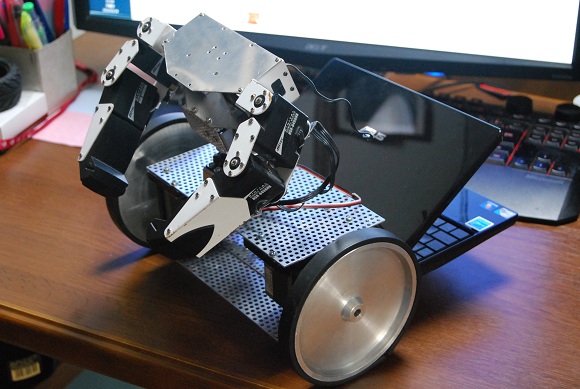
上半身と下半身を合体させてパソコンを搭載しました。
とはいってもノーパソは単に乗っけただけです。
自宅にNC等の工作機械があればいろいろパーツも作れるのですが。
まぁ愚痴を言ってもしょうがないので最善を尽くしましょう。
基本的にパンチングボード(穴あきアルミ板)と角材を使用します。
パンチングボードはロボット製作初心者にとっては非常に効果的です。
穴があいているので基板、モータ等を簡単にねじ止め出来ますからね。
切りたい場合は回転丸のこ、もしくはハンドニブラを使ってガシガシと。
最低限の加工でかなりの精度を得ることができます。
ただしブラケットを作ろうと思ったらやはり一枚板のアルミから作らないと強度が足らないですね。
ポイントは、きれいにシンプルに使いやすく。

PR
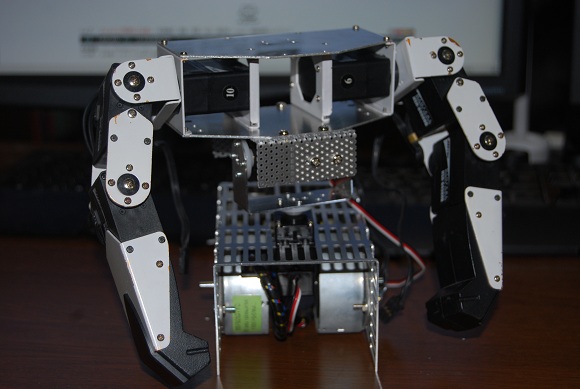
上半身だけ出来た。
下半身は仮なのでもっと大きくなります。
腕はRobonova-1のパーツを流用しましたが、
手先はモノをつかめるようグリップをつけたいところです。
頭はカメラ乗っけるから、どっかから安いのを探してこないとなぁ・・・。
新入生歓迎会には何とか間に合わせねば!!
ある程度形になったらニコ動にUPします。
ブログタイトルにロボットとあるのに、全然ロボットの話してないや(笑)
別にロボットをやめたわけではないんです。
今後はしっかり掲載していこう。
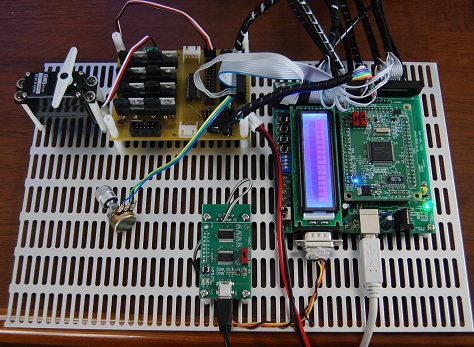
さて今回はプログラミング練習用に写真のようなボードを組みました。
パンチングボード(網目状のアルミ板)がこんなところで役に立つとは(笑)
マイコンをいろいろ動かそうと思ったら周辺機器がいくつか必要になるわけです。
ケーブルやらなんやらでごちゃごちゃしがちな実験装置。
なんかいやですねぇ。
それを整理してしまおうということで今回の装置になったというわけです。
搭載部品
- H8-3052USB開発キットボード(64bitOSのためドライバが入らん・・・)
- USB-Serial通信ボード
- GWSサーボS03T 2BBMG
- 周辺ボード(サーボ、AD、バイポーラステッピングモータドライバ)
- ポテンショメータ
今日はポテンショメータとサーボを同期させるところまで出来たのです。
将来的に行うことは
- パソコンとのシリアル通信(USBドライバ誰か助けて・・・)
- 数十個のサーボモータを同時制御してマニピュレータを作る
- カメラを同期させて画像解析(ARとか面白そうです)

GIGABYTEのGA-GC230Dというマザーボード。
なんとこいつはmini-ITX!!
ちっさい!
およそ16センチ四方の大きさしかありません。
こいつを使ってロボットを作ろう~といった企画。
「ロボットと言えばマイコンだろー!」
というお叱りを受けそうですが、
カメラ積んだり無線したり、ハイレベルな解析やデータロギングは
マイコンでは役不足な気がするわけですよ。
電電が作りたいのは実用的なペットロボット。
本体はパソコンなのでインターフェースは文句なし。
開発するのもなかなか簡単。
ネットにつながっていれば遠隔操作もできる。
問題になってくるのは以下の項目。
1.大きさ
2.バッテリー(コードはイヤ!)
3.資金
実際大きさは今回のマザーボードを使用することでかなり小さくなった。
まぁモータやサーボ、センサ類はマイコンを間にかませてシリアル通信ですが。
VC++でアプリケーションを作ればさらに楽ちん。
そこで重要になってくるのがワイヤレス化!!
無線LANは何とかなるとして、
デスクトップパソコンをバッテリー化するのがこれまた面倒。
でもここで神は挑戦者に味方した!!
http://www.blogazo.net/se.cgi?q=SKC-MINI120&c=0&id=blogazo-22
このケース、13000円くらいするのだが、
今日ビッグカメラで3900円で売っていたのだ!
何が嬉しいと言って、
マザーボード用の電源が「ACアダプタ」からとれるということ!!
要するに12Vの直流電源さえ用意すればバッテリー化できるのだ。
なんでも、昨日生産打ち切りのため値下げしたのだとか。
すごい偶然だ・・・。
ということで現在組み上げてXPをインストール中。
ATOM搭載なのでそこそこ早い。

ひそかにアプリケーションを作っております。
昨日やっとマイコンと通信できるアプリができたところ。
単純に文字送ってLED光らせただけなんだけどね。
だけど動いたときは一人でガッツポーズをしておりました(笑)
あとは無線LANで遠隔操作とウェブカメラで画像解析!
ハードルが高そうだ・・・
カレンダー
| 03 | 2024/04 | 05 |
| S | M | T | W | T | F | S |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 7 | 8 | 9 | 10 | 11 | 12 | 13 |
| 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| 21 | 22 | 23 | 24 | 25 | 26 | 27 |
| 28 | 29 | 30 |
カテゴリー
フリーエリア
最新コメント
[01/24 ケロロ管理人]
[01/16 nas_iron]
[07/01 白石]
[03/11 北大サークル情報局運営委員会]
[09/13 うどんこしょういち]
最新記事
(12/09)
(10/11)
(09/06)
(08/23)
(07/15)
(01/16)
(01/16)
(06/28)
(01/30)
(01/01)
最新トラックバック
プロフィール
HN:
北のロボット博士
性別:
非公開
自己紹介:
北海道生まれ。
北海道にロボットフィールドを作ろうと日々奮闘中。
北海道にロボットフィールドを作ろうと日々奮闘中。
バーコード
ブログ内検索
最古記事
(07/28)
(07/29)
(07/30)
(08/01)
(08/02)
(08/03)
(08/04)
(08/05)
(08/05)
(08/10)
カウンター
アクセス解析
カウンター